compaction
作用:leveldb - handbook
-
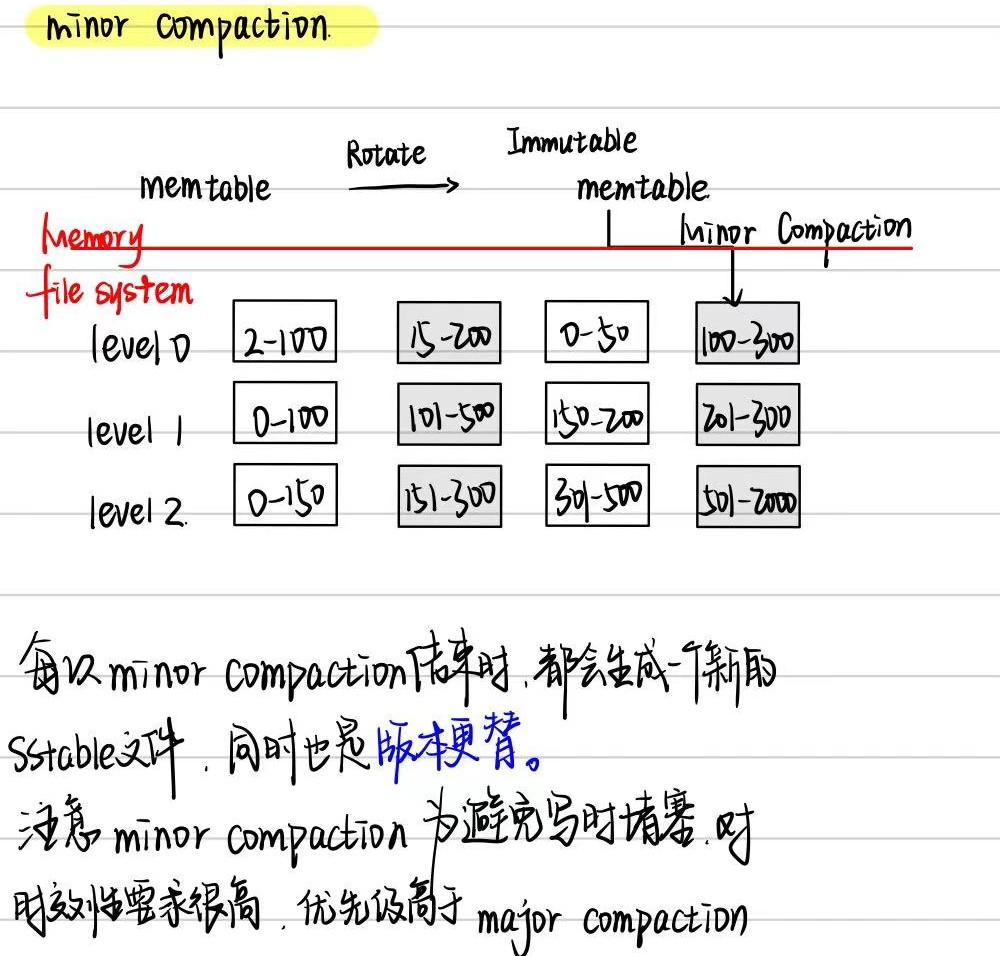
数据持久化。一次minor compaction的产出是一个0层的sstable文件,其中包含了所有的内存数据。但是若干个0层文件中是可能存在数据overlap的。
-
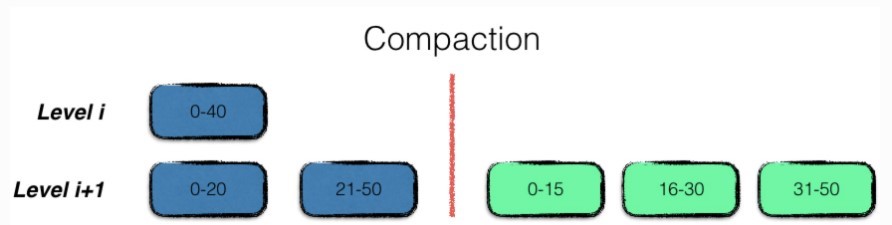
提高读写效率。Major Compaction的过程,将0层中的文件合并为若干个没有数据重叠的1层文件。对于没有数据重叠的文件,一次查找过程就可以进行优化,最多只需要一个文件的遍历即可完成。因此,leveldb设计compaction的目的之一就是为了提高读取的效率。
-
平衡读写差异。有了minor compaction和major compaction,所有的数据在后台都会被规定的次序进行整合。但是一次major compaction的过程其本质是一个多路归并的过程,既有大量的磁盘读开销,也有大量的磁盘写开销,显然这是一个严重的性能瓶颈。
但是当用户写入的速度始终大于major compaction的速度时,就会导致0层的文件数量还是不断上升,用户的读取效率持续下降。所以leveldb中规定:
- 当0层文件数量超过
SlowdownTrigger时,写入的速度主要减慢; - 当0层文件数量超过
PauseTrigger时,写入暂停,直至Major Compaction完成;
- 当0层文件数量超过
-
整理数据。leveldb的每一条数据项都有一个版本信息,标识着这条数据的新旧程度。这也就意味着同样一个key,在leveldb中可能存在着多条数据项,且每个数据项包含了不同版本的内容。为了尽量减少数据集所占用的磁盘空间大小,leveldb在major compaction的过程中,对不同版本的数据项进行合并。
Compaction过程
minor compaction介绍
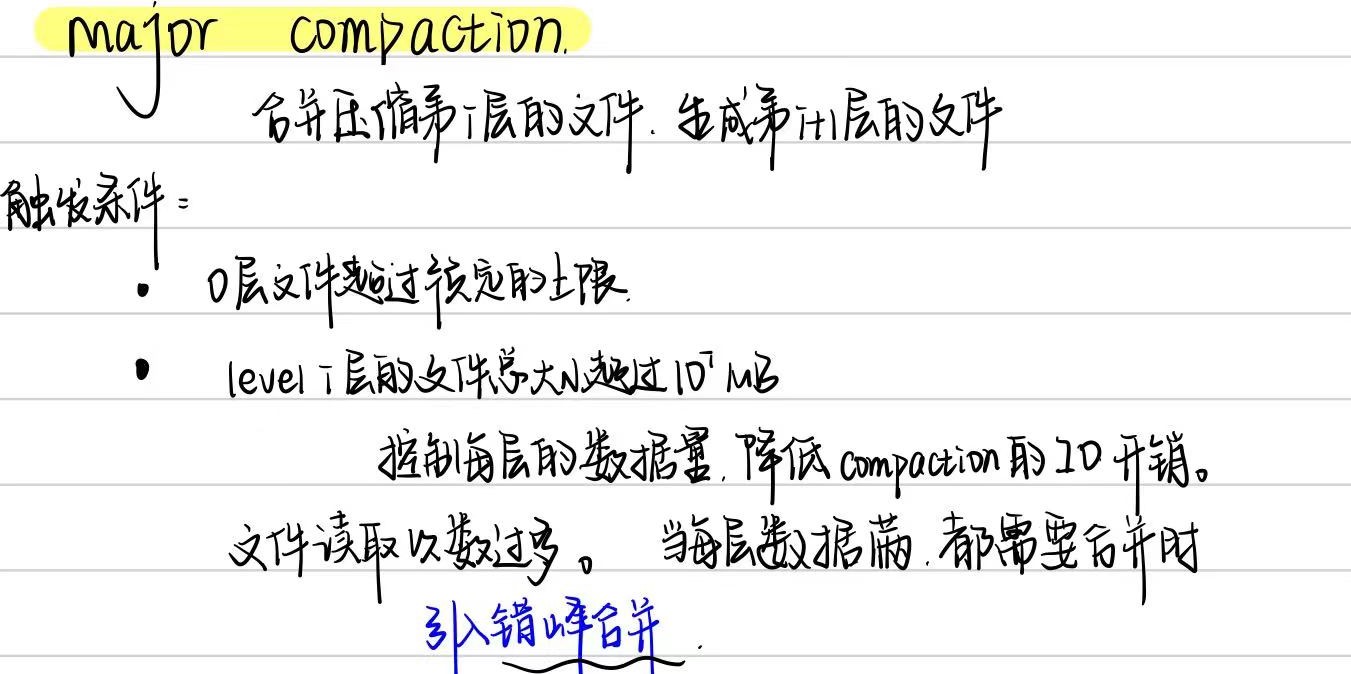
major compaction介绍
- Size Compaction:根据每层总SSTable大小触发(level-0根据SSTable数)的Major Compaction。
- Seek Compaction:根据SSTable的seek miss触发的Major Compaction。
- Manual Compaction:LevelDB使用者通过接口
void CompactRange(const Slice* begin, const Slice* end)手动触发。
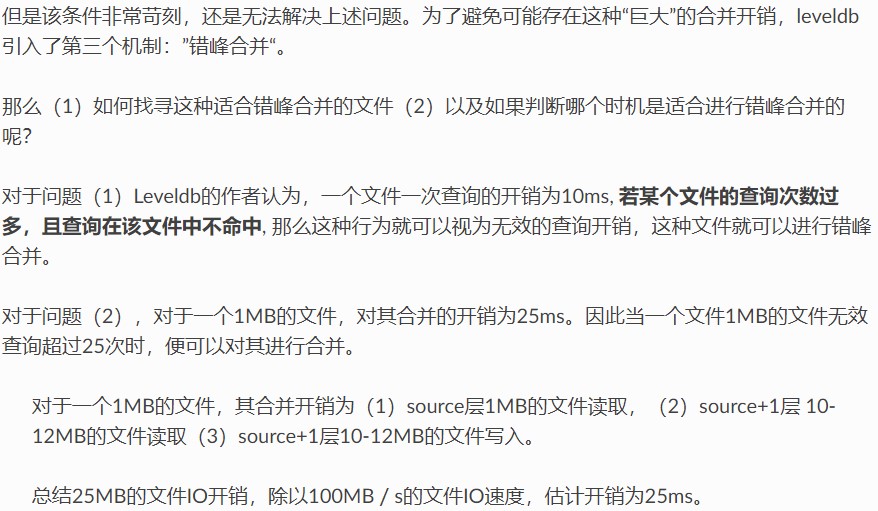
错峰合并
对于错峰合并网上是这么讲解的,我暂时还没看懂:
采样检测
每个sstable文件的元数据中,还有一个额外的字段seekLeft,默认为文件的大小除以16KB。leveldb在正常的数据访问时,会顺带进行采样探测。正常的数据访问包括(1)用户直接调用Get接口(2)用户使用迭代器进行访问。
采样的规则:
- 记录本次访问的第一个sstable文件。
- 若在该文件中访问命中,则不做任何处理;若在该文件中访问不命中,则对 该文件的
seekLeft标志做减一操作。 - 某一个文件的
seekLeft标志减少到0时,触发错峰合并。
故以上三种机制可以保障每次进行compaction的时候,总体开销不会呈现上升趋势。
过程
-
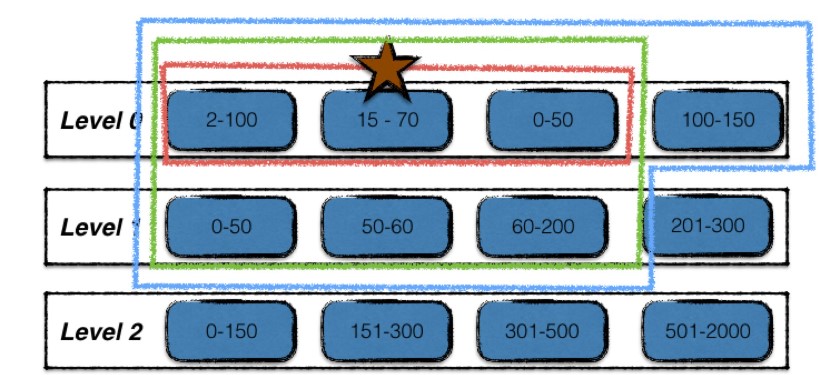
寻找合适的输入文件;
对于level 0层文件数过多引发的合并场景或由于level i层文件总量过大的合并场景,采用轮转的方法选择起始输入文件,记录了上一次该层合并的文件的最大key,下一次则选择在此key之后的首个文件。
对于错峰合并,起始输入文件则为该查询次数过多的文件。
-
根据key重叠情况扩大输入文件集合;
-
多路合并;
多路合并的过程比较简单,即将level i层的文件,与level i+1层的文件中的数据项,按序整理之后,输出到level i+1层的若干个新文件中,即合并完成。
注意在整理的过程中,需要将冗余的数据进行清理,即同一条数据的多个版本信息,只保留最新的那一份。但是要注意,某些仍然在使用的旧版本的数据,在此时不能立刻删除,而得等到用户使用结束,释放句柄后,根据引用计数来进行清除。
-
积分计算;
每一次compaction都会消除若干source层的旧文件,新增source+1层的新文件,因此触发进行合并的条件状态可能也发生了变化。故在leveldb中,使用了计分牌来维护每一层文件的文件个数及数据总量信息,来挑选出下一个需要进行合并的层数。
计分的规则很简单:
- 对于0层文件,该层的分数为文件总数/4;
- 对于非0层文件,该层的分数为文件数据总量/数据总量上限;
将得分最高的层数记录,若该得分超过1,则为下一次进行合并的层数;
由于leveldb内部进行compaction时有trivial move优化,且根据内部的文件格式组织,用户在使用leveldb时,可以尽量将大批量需要写入的数据进行预排序,利用空间局部性,尽量减少多路合并的IO开销。
Compact源码分析
后台线程
为了防止Compaction执行时阻塞LevelDB的正常读写,LevelDB的所有Compaction都通过一个后台线程执行。接口定义在了include/leveldb/env.h中,在不同环境中的实现分别位于util/env_windows.cc与env_posix.cc中。
在env.h的schedule接口中,首先检测后台线程是否创建,如果没有创建创建后台线程。接下来会将任务放入后台线程的任务队列中,并通过信号量唤醒后台线程执行。创建后台线程与操作任务队列都需要通过锁来保护,因此该方法全程加锁。
后台线程会循环获取任务丢列中的任务,为了避免线程空转,在队列为空时通过信号量等待唤醒。如果队列中有任务,则获取该任务并将任务出队,然后执行任务。后台线程中操作队列的部分需要通过锁来保护,而执行任务时没有上锁,可以并行执行(但是LevelDB只使用了1个后台线程,因此Compaction仍是串行而不是并行的)。
优先级
Minor Compaction > Manual Compaction > Size Compaction > Seek Compaction
这里应当涉及几个问题:
1.compaction什么时候会被触发,对应代码是什么。2.触发时的先后顺序什么样子,对应什么代码。
db_impl.cc
在 LevelDB 的 db_impl.cc 文件中,主要负责处理对数据库的主要操作.
- 打开和关闭数据库:管理数据库的生命周期。
- 读写操作:提供对键值对的插入、查找和删除功能。
- 压缩和合并:实现后台压缩和合并的逻辑,优化存储。
- 状态管理:维护数据库的状态,包括错误状态和后台任务的调度。
- 事务处理:支持事务相关的操作。
db_impl.cc中的void MaybeScheduleCompaction() EXCLUSIVE_LOCKS_REQUIRED(mutex_);会判断是否执行Compaction:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
void DBImpl::MaybeScheduleCompaction() {
mutex_.AssertHeld();
// 检查是否有后台压缩任务被调度,如果有就不做操作
if (background_compaction_scheduled_) {
// Already scheduled
} else if (shutting_down_.load(std::memory_order_acquire)) {
// DB is being deleted; no more background compactions
// DB正在关闭时,不能调度任何压缩任务
} else if (!bg_error_.ok()) {
// Already got an error; no more changes
// 有错误时,不能进行任何压缩任务
} else if (imm_ == nullptr && manual_compaction_ == nullptr &&
!versions_->NeedsCompaction()) {
// No work to be done
// 没有任何待处理的压缩,则不调度压缩
} else {
// 当避免了各种不必要的操作和潜在问题时,可以调度压缩任务
background_compaction_scheduled_ = true;
env_->Schedule(&DBImpl::BGWork, this);
}
}
上面的最后一个if判断待处理的压缩时,imm_==nullptr对应的是Minor Compaction;然后就是munual compaction(手动触发),以及最后的version所需要的Size Compaction(某层的大小超过限制)或者Seek Compaction(多次寻找miss)
在versions中的对于后面两种情况的触发为:
1
2
3
4
5
6
7
// Returns true iff some level needs a compaction.
bool NeedsCompaction() const {
Version* v = current_;
// compaction_score_字段用来计算是否需要触发Size Compaction,
// file_to_compact_用来计算是否需要触发Seek Compaction
return (v->compaction_score_ >= 1) || (v->file_to_compact_ != nullptr);
}
Minor Compaction范围
在LSTtree的基本概念中,Minor Compaction只需要将Immutable转储为SSTable并将其推送到level0即可。
而LevelDB对这一步骤进行优化,其会将MinorCompaction生成的SSTable推至更高的层级。
-
为什么要推到更高的层级,这个步骤不是major compaction要做的吗
major compaction需要对level中的多个文件进行复杂的合并和去重,涉及复杂的键比较和重复数据的处理,同时需要对Manifest进行频繁的更新去记录新的文件和合并后的状态,也有复杂的IO操作,开销较大。minor compaction只需要将memtable的数据进行写入即可,memtable也通常较小,不涉及复杂的操作,有利于提升性能。 -
关于推到更高的层级最多也只能是两层的解释。
level0层的文件通常是无序的,往上的更高层级则要求文件按照键进行排序。
通常是对于数据进行读取和去重然后推送到更高的层级。随着层级的提高,文件数量越来越少,但是文件的数据量更多,访问的数据块也越多,这会增加IO开销。
进行minor compaction时,本身文件量并不高,推导更高的层级反而导致了更大的开销,得不偿失。
那如何确定讲memtable中的数据存放在哪个层级,看下面的代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
/*确立memtable输出的数据应该存放哪个层级*/
int Version::PickLevelForMemTableOutput(const Slice& smallest_user_key,
const Slice& largest_user_key) {
int level = 0;
// 看level0是否与memtable输出的键有重叠,如果没有,继续向下查找
// 没有重叠向下查找是为了确保多个层级之间都没有重叠,减少对于major的调用,提升性能
// 存在重叠的愿意按:多版本的不同数据,同一个文件的多个用户间,文件分布不均等
// major就是拿来处理层与层之间的重叠,进而定期优化清理层级结构。
if (!OverlapInLevel(0, &smallest_user_key, &largest_user_key)) {
// Push to next level if there is no overlap in next level,
// and the #bytes overlapping in the level after that are limited.
InternalKey start(smallest_user_key, kMaxSequenceNumber, kValueTypeForSeek);
InternalKey limit(largest_user_key, 0, static_cast<ValueType>(0));
std::vector<FileMetaData*> overlaps;
// 循环遍历,直到达到最大内存压缩层级
while (level < config::kMaxMemCompactLevel) {
if (OverlapInLevel(level + 1, &smallest_user_key, &largest_user_key)) {
break; // 有重叠时保持当层级退出
}
// 如下面两层的重叠字数超过最大值时,容易导致性能问题,层级不能上升
if (level + 2 < config::kNumLevels) {
// Check that file does not overlap too many grandparent bytes.
GetOverlappingInputs(level + 2, &start, &limit, &overlaps);
const int64_t sum = TotalFileSize(overlaps);
if (sum > MaxGrandParentOverlapBytes(vset_->options_)) {
break;
}
}
level++;
}
}
return level;
}
紧接着就又存在了一个问题,minor compaction和major compaction的执行过程究竟哪里不同,才会导致它们在不同的情况下使用。这个后面会结合代码解释,先大致说说。
Major Compaction
- 目的: Major Compaction 主要是将 Level 0 中的所有文件合并到 Level 1,并将 Level 1 中的文件合并到 Level 2,以减少文件数量和重叠,提高查找效率。
- 执行过程
- 选择文件: 选择需要合并的文件,通常是 Level 0 中的所有文件。
- 读取数据: 读取所有选择的文件的数据,可能涉及多个文件的内容。
- 去重和排序: 对读取到的所有键值对进行去重和排序,以确保合并后的文件是有序的。
- 写入新文件: 将合并后的数据写入新文件,并将其放入更高层级(如 Level 1)。
- 更新状态: 更新 Manifest 文件,记录新文件的位置和状态。
- 删除旧文件: 旧的合并文件会被删除,释放存储空间。
Minor Compaction
- 目的: Minor Compaction 主要是将 MemTable 中的数据写入 Level 0,并将 Level 0 中的一些文件推送到更高层级(如 Level 1),通常处理较小的数据量。
- 执行过程
- 选择 MemTable: 从 MemTable 中选择数据进行写入。
- 写入 Level 0: 将 MemTable 中的数据直接写入 Level 0 的新文件。
- 合并操作: 在 Level 0 中,可能会选择一些文件进行简单的合并(如果有)。
- 更新状态: 更新 Manifest 文件,记录新文件的位置。
- 释放空间: 旧的 MemTable 数据被替换或清理。
Major Compaction范围
LevelDB在进行Major Compaction时,至少需要确定以下参数:
- 确定Compaction起始层级i,通常为level0,因为该层数量最多最容易重叠。
- 确定level_i层SSTable input,识别需要合并的sstable文件。
- 找到i+1层中与当前层级中,没有合并的sstable存在重叠的文件,讲这些重叠文件和当前文件一起处理生成新的文件放在i+1层文件中。
由于三种Major Compaction的起始条件与目标都不同,其确定这三个参数的方式稍有不同。
后台线程中的compaction
DBImpl::BGWork是后台线程的执行入口。具体情况从代码中分析:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
/*将db通过类型转换程DBImpl,然后调用BackGroundCall接口,启动和调度后台处理任务。*/
void DBImpl::BGWork(void* db) {
reinterpret_cast<DBImpl*>(db)->BackgroundCall();
}
/*处理levelDB的后台任务*/
void DBImpl::BackgroundCall() {
MutexLock l(&mutex_); // 创建互斥锁,保证线程安全。
assert(background_compaction_scheduled_); // 确保后台有任务被调度
if (shutting_down_.load(std::memory_order_acquire)) {
// No more background work when shutting down.
// 数据库正在关闭时不执行任何后台工作,避免关闭过程中继续处理数据导致数据损坏
} else if (!bg_error_.ok()) {
// No more background work after a background error.
// 排除后台错误
} else {
// 执行合并操作,将levelDB中的数据整理并优化到适当的层级
// 只要满足条件触发合并,这个过程就会不断被调用
// 首次遍历,优化存储,减少重叠文件和荣誉数据
BackgroundCompaction();
}
// 重置调度装置,表示任务完成,避免重复执行同一个合并任务
background_compaction_scheduled_ = false;
// Previous compaction may have produced too many files in a level,
// so reschedule another compaction if needed.
MaybeScheduleCompaction(); // 检查是否需要重新调度合并,对sstable文件数量进行评估
background_work_finished_signal_.SignalAll(); // 唤醒等待线程,可以促进触发新的合并
}
我还挺好奇,BackgroundCompaction和MaybeScheduleCompaction的具体差异,后者前面分析过了,有待处理的压缩比如minor compaction或者major compaction时会调用。
看看BackgroundCompaction()这个函数:代码比较长,这里就叙述一下大致逻辑:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
/*leveldb的核心部分,涵盖了合并的选择,执行和状态管理*/
void DBImpl::BackgroundCompaction() {
// 上锁保障线程安全
mutex_.AssertHeld();
// 处理尚未合并的immutable memetable
if (imm_ != nullptr) {
CompactMemTable();
return;
}
// 处理尚未合并的 munual compaction
// 根据is_munual选择对c进行手动合并还是自动合并
Compaction* c;
bool is_manual = (manual_compaction_ != nullptr);
// 对c进行再次检查的主要原因是为了确保合并操作的完整性和正确性。
// 第一次合并主要是处理选择出来的SSTable文件,执行合并操作。
// 第二次目的是确认合并结果
Status status;
/*c为空时,跳过;
当前任务不是mutual compaction,则判断是不是is_trivial move(只需要从一层移动到下一层),既不需要合并也不需要拆分SSTable,只通过Versionset修改一下level的文件编号即可。
否则,执行compaction的操作,依次执行DoCompactionWork、CleanupCompaction、RemoveObsoleteFiles。*/
if (c == nullptr) {
// Nothing to do 没有合并文件
} else if (!is_manual && c->IsTrivialMove()) {...}
// 错误处理,状态更新
}
// is_manual为1则是手动合并,为0则是自动合并。
至于Compaction::IsTrivialMove的实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
/*判断当前的操作是否可以简单移动*/
bool Compaction::IsTrivialMove() const {
const VersionSet* vset = input_version_->vset_;
// Avoid a move if there is lots of overlapping grandparent data.
// Otherwise, the move could create a parent file that will require
// a very expensive merge later on.
// 当前层有文件而下一层没有文件,因为这确保了移动不会引入重叠,并简化了未来的合并流程
// 如果在进行简单移动时,当前层的文件与祖父层的文件重叠过多,这可能导致在未来需要进行昂贵的合并操作
// 如果当前层与下一层之间的重叠较少,则在合并时主要关注当前层和下一层之间的关系,而与祖父层的关系相对较小。也就是让祖父层和下一层重叠多是一个很糟的决定
return (num_input_files(0) == 1 && num_input_files(1) == 0 &&
TotalFileSize(grandparents_) <=
MaxGrandParentOverlapBytes(vset->options_));
}
Minor Compaction
对于该步的直接理解在于,从immutable memtable转换成磁盘中的sstable文件,接下来看看具体过程。
触发
首先我们了解一下Memtable转换成Immutable Memtable的过程,这个是在DBImpl::MakeRoomForWrite中。
1
2
3
4
5
6
7
8
9
10
/*
leveldb是流控和等待的方式。
在这个函数中,通过综合内存管理和文件状态,确保leveldb在写入时的高效性。
在循环写入的过程中,会对不同的情况进行判断,比如
1.level0文件数量接近上限(默认为8,超过4时会触发minor compaction),开始对写入操作施加延迟,减少坚持波动给压缩线程留出时间
2.内存表有足够空间时,继续写入,memtable有空间
3.内存表已满,并且之前的内存表正在压缩(memtable已满,immutable memtable没有完成minor compaction),等待
4.磁盘中level0文件太多,超过8时,等待
5.切换到新的内存表,压缩之前的内存表,更新状态
*/
在触发Minor Compaction前,就切断到新的WAL写入,如果Minor Compaction失败,就需要从这之前的WAL中恢复;如果Minor Compacton没有完成,leveldb不会删除旧的WAL,因此不会出现数据丢失问题,LevelDB这样做是为了在保证安全地情况下,避免Minor Compaction操作阻塞对LevelDB的正常读写。
Size Compaction
触发
在非level0层根据总的sstable大小触发,在level0层根据该层的sstable数触发。也就是说只有发生了Compaction,才有可能触发Size Compaction.
Compaction的执行会导致Version的更新,因此LevelDB在VersionSet::LogAndApply方法更新Version之后,让其调用VersionSet::Finalize计算每层SSTable看是否需要SIze,然后选出最需要size compaction的层作为下次目标。
(这个应该就是根据每层的sstable的数量进行触发,当到达边缘时,会重排进行一些整体,具体操作后面讲,先看看触发条件)
在后台线程的DBImpl::BackgroundCall方法中,该方法在完成Compaction操作后,会再次调用MaybeScheduleComapction方法,触发上次因Compaction而需要的Size Compaction操作。
1
2
3
4
5
6
7
void DBImpl::BackgroundCall() {
// ... ...
// Previous compaction may have produced too many files in a level,
// so reschedule another compaction if needed.
MaybeScheduleCompaction();
background_work_finished_signal_.SignalAll();
}
Seek Compaction
触发
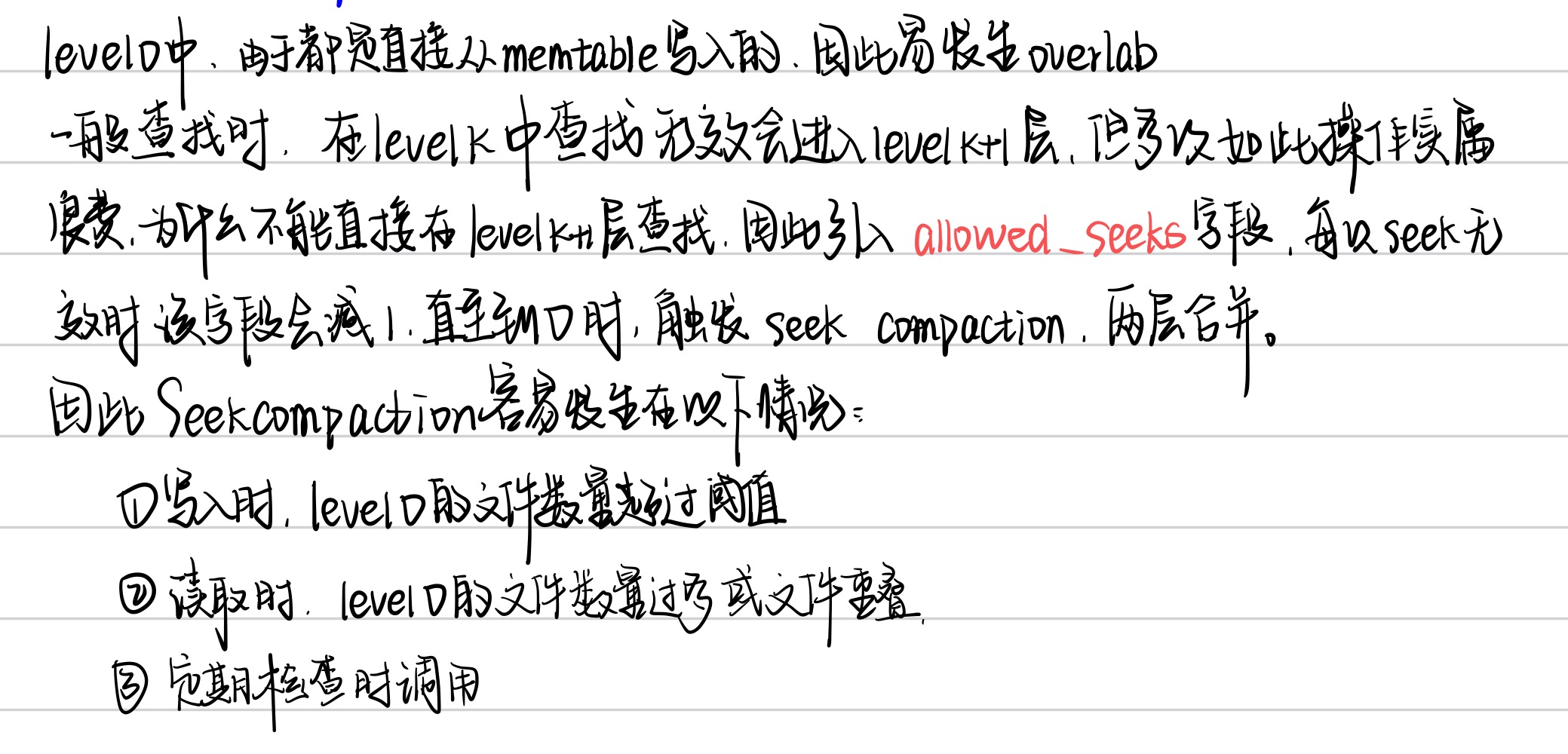
当leveldb查找key时,会记录一些统计信息。当在SSTable上查找时,会记录发生seekmiss的SSTable,这样更新version中相应的FileMetaData中的allowed_seeks字段,并且通过MaybeScheduleCompaction检查是否需要触发Seek Compaction。
在DBImpl::Get函数(读取)中,每次读取会对更新的信息进行统计,然后再判断是否需要进行seek compaction,以下为代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
Status DBImpl::Get(const ReadOptions& options, const Slice& key, std::string* value) {
Status s;
MutexLock l(&mutex_); // 加锁保护
SequenceNumber snapshot;
if (options.snapshot != nullptr) {
snapshot = // 确认快照
static_cast<const SnapshotImpl*>(options.snapshot)->sequence_number();
} else {
snapshot = versions_->LastSequence();
}
MemTable* mem = mem_; // 获取当前的内存表和不可变内存表
MemTable* imm = imm_;
Version* current = versions_->current(); // 当前版本的引用
mem->Ref();
if (imm != nullptr) imm->Ref();
current->Ref();
bool have_stat_update = false;
Version::GetStats stats;
// Unlock while reading from files and memtables
{
mutex_.Unlock();
// First look in the memtable, then in the immutable memtable (if any).
LookupKey lkey(key, snapshot);
if (mem->Get(lkey, value, &s)) {
// Done 先在当前内存表找
} else if (imm != nullptr && imm->Get(lkey, value, &s)) {
// Done 再在不可变内存表中找
} else {
// 最后在当前版本的SSTable文件中查找
s = current->Get(options, lkey, value, &stats);
have_stat_update = true;
}
mutex_.Lock();
}
// 如果查找时更新了统计信息,调用MaybeScheduleCompaction决定是否需要进行压缩
if (have_stat_update && current->UpdateStats(stats)) {
MaybeScheduleCompaction(); // 这个会对各种压缩是否需要进行检查
}
// 解除引用计数
mem->Unref();
if (imm != nullptr) imm->Unref();
current->Unref();
return s;
}
在Version::Get中,逐层遍历覆盖了给定的lookupkey的sstable,同时调用match判断是否有我们想要查找的internalkey,即如果发生了seek就会调用match。
如果sstable中没有该key,则会继续查找,当找到了key时返回false。Match还会记录第一次seek miss的SSTable。DBImpl::Get会将SSTable的allowed_seeks减1,MaybeScheduleCompaction检查是否需要触发Seek Compaction。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
Status Version::Get(const ReadOptions& options, const LookupKey& k,
std::string* value, GetStats* stats) {
stats->seek_file = nullptr;
stats->seek_file_level = -1;
struct State {
Saver saver;
GetStats* stats;
const ReadOptions* options;
Slice ikey;
FileMetaData* last_file_read;
int last_file_read_level;
VersionSet* vset;
Status s;
bool found;
static bool Match(void* arg, int level, FileMetaData* f) {
State* state = reinterpret_cast<State*>(arg);
// 没有找到文件时,记录当前文件和层级
if (state->stats->seek_file == nullptr &&
state->last_file_read != nullptr) {
// 检查是否有文件已经被访问过
// We have had more than one seek for this read. Charge the 1st file.
state->stats->seek_file = state->last_file_read;
state->stats->seek_file_level = state->last_file_read_level;
}
state->last_file_read = f;
state->last_file_read_level = level;
// 使用tablecache从缓存中获取数据
state->s = state->vset->table_cache_->Get(*state->options, f->number,
f->file_size, state->ikey,
&state->saver, SaveValue);
if (!state->s.ok()) {
state->found = true;
return false;
}
switch (state->saver.state) {
case kNotFound: // 继续找其它文件
return true; // Keep searching in other files
case kFound: // 找到键更新状态返回
state->found = true;
return false;
case kDeleted: // 返回,键已删除
return false;
case kCorrupt: // 记录错误状态返回
state->s =
Status::Corruption("corrupted key for ", state->saver.user_key);
state->found = true;
return false;
}
// Not reached. Added to avoid false compilation warnings of
// "control reaches end of non-void function".
return false;
}
};
State state;
state.found = false;
state.stats = stats;
state.last_file_read = nullptr;
state.last_file_read_level = -1;
state.options = &options;
state.ikey = k.internal_key();
state.vset = vset_;
state.saver.state = kNotFound;
state.saver.ucmp = vset_->icmp_.user_comparator();
state.saver.user_key = k.user_key();
state.saver.value = value;
/*遍历版本中的文件,查找与给定的用户键和内部键重叠的文件,并通过回调函数处理这些文件。通过分层的方式,确保在最新文件优先的同时,也不遗漏其他层中的重叠文件。*/
ForEachOverlapping(state.saver.user_key, state.ikey, &state, &State::Match);
return state.found ? state.s : Status::NotFound(Slice());
}
get函数中,文件的访问和查找会统计访问过的文件。虽然不是直接的seek compaction,但是为后续的compaction提高了信息,判断哪些文件需要被合并以减少查找时的IO。
ForEachOverlapping函数中,查找过程会遍历多个层次的文件,通过重叠查找相关文件,这有助于进行seekcomapction时,确定哪些文件时重叠的进而决定compaction。
Manual Compaction
触发
Manual Comapction的触发时机比较简单。
当LevelDB的用户调用DB::CompactRange接口时,LevelDB会检查用户给定的Compact范围与当前状态,判断是否需要执行Manual Compaction。
如果确定执行Manual Compaction,则设置manual_compaction_,再调用MaybeScheduleCompaction方法以尝试触发Manual Compaction。
Minor Compaction执行
以下两个函数是imm转变为sst的过程,
- 文件添加:
DBImpl::WriteLevel0Table创建新的 SST 文件并将其添加到 Level 0或者其它层级。 - 触发条件:一旦 Level 0 中的文件数量达到预设阈值,系统会自动触发 minor compaction。
- 合并操作:在 minor compaction 过程中,Level 0 的 SST 文件会被合并并输出到 Level 1,减少 Level 0 的文件数量,提高性能。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
/*将imm变为SSTable,同时添加到leveldb的版本控制和文件管理。*/
void DBImpl::CompactMemTable() {
mutex_.AssertHeld(); // 操作期间有锁,避免并发问题(并发控制)
assert(imm_ != nullptr);
// Save the contents of the memtable as a new Table
VersionEdit edit; // 版本编辑(内存管理)
Version* base = versions_->current();
base->Ref(); // 引用版本
Status s = WriteLevel0Table(imm_, &edit, base); // 将imm写入level0,更新版本信息
base->Unref();
// 如果写入成功并且正在关闭数据库,记录错误返回
if (s.ok() && shutting_down_.load(std::memory_order_acquire)) {
s = Status::IOError("Deleting DB during memtable compaction");
}
// 如果没有错误,更新版本信息(错误管理)
// Replace immutable memtable with the generated Table
if (s.ok()) {
edit.SetPrevLogNumber(0);
edit.SetLogNumber(logfile_number_); // Earlier logs no longer needed
s = versions_->LogAndApply(&edit, &mutex_);
}
// 清理空间,清理错误文件(性能优化)
if (s.ok()) {
// Commit to the new state
imm_->Unref();
imm_ = nullptr;
has_imm_.store(false, std::memory_order_release);
RemoveObsoleteFiles();
} else {
RecordBackgroundError(s);
}
}
重点在WriteLevel0Table这个函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
/*要用于将内存表(MemTable)的数据写入到 Level0的SST文件中*/
/*
* meta文件元数据,通过mem的迭代器保存到sst文件中
* edit描述数据库版本的更改,记录新文件的添加和删除等信息
* base当前数据库版本,参考已经存在的数据和文件信息
*/
Status DBImpl::WriteLevel0Table(MemTable* mem, VersionEdit* edit,
Version* base) {
mutex_.AssertHeld(); // 确保有锁
const uint64_t start_micros = env_->NowMicros(); // 记录开始时间
FileMetaData meta; // 创建文件元数据
meta.number = versions_->NewFileNumber();
pending_outputs_.insert(meta.number);
Iterator* iter = mem->NewIterator(); // 创建迭代器遍历内存表
Log(options_.info_log, "Level-0 table #%llu: started",
(unsigned long long)meta.number); // 记录日志
Status s;
{ // 加锁建构表
mutex_.Unlock(); // (理清表中有什么,meta中有什么)
/*
BuildTable 函数负责实际的写入过程。
它将遍历迭代器中的数据,并写入到新SST文件中。
会在指定数据库目录中创建新文件,文件名基于meta.number生成。
*/
s = BuildTable(dbname_, env_, options_, table_cache_, iter, &meta);
mutex_.Lock();
}
// 日志记录和删除迭代器
Log(options_.info_log, "Level-0 table #%llu: %lld bytes %s",
(unsigned long long)meta.number, (unsigned long long)meta.file_size,
s.ToString().c_str());
delete iter;
pending_outputs_.erase(meta.number); // 这个pending_outputs什么作用?
// 主要用于跟踪正在进行的写入操作,避免同一时刻对同一个文件进行多次写入
// 防止并发造成的数据破坏
// Note that if file_size is zero, the file has been deleted and
// should not be added to the manifest.
int level = 0; // 表格构建成功,文件大小大于0
if (s.ok() && meta.file_size > 0) {
const Slice min_user_key = meta.smallest.user_key();
const Slice max_user_key = meta.largest.user_key();
if (base != nullptr) {
// 根据用户键选择写入层级
level = base->PickLevelForMemTableOutput(min_user_key, max_user_key);
}
// 将文件信息添加到版本编辑中
edit->AddFile(level, meta.number, meta.file_size, meta.smallest,
meta.largest);
}
CompactionStats stats;
stats.micros = env_->NowMicros() - start_micros;
stats.bytes_written = meta.file_size;
stats_[level].Add(stats);
return s;
}
CompactRange 函数主要用于执行 minor compaction,它将 Level 0 中的 SST 文件合并到 Level 1 或更高层级。其主要作用是优化存储结构,减少 Level 0 的文件数量,提升查询和写入性能。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
/*处理leveldb中的范围压缩*/
void DBImpl::CompactRange(const Slice* begin, const Slice* end) {
int max_level_with_files = 1;
{
MutexLock l(&mutex_);
Version* base = versions_->current(); // 获取当前版本
for (int level = 1; level < config::kNumLevels; level++) {
if (base->OverlapInLevel(level, begin, end)) {
max_level_with_files = level; // 查找有重叠的最高层级
}
}
}
TEST_CompactMemTable(); // TODO(sanjay): Skip if memtable does not overlap
for (int level = 0; level < max_level_with_files; level++) {
TEST_CompactRange(level, begin, end); // 对每个层级进行范围压缩
// 将指定范围的sst文件合并,更新数据库存储结构
}
}
于从 Level 0 到找到的最高层级,CompactRange 会调用 TEST_CompactRange 函数,依次压缩每个层级。
- 压缩过程:
- 读取文件:选择与指定范围重叠的 SST 文件。
- 合并数据:将这些文件中的数据合并,进行排序和去重。
- 写入新文件:将合并后的结果写入新的 SST 文件,存储在目标层级。
- 更新版本信息:压缩完成后,更新数据库的版本信息,移除已合并的旧文件。
Major Compaction执行
关于major,我们来分析一个比较长的函数DBImpl::DoCompactionWork:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
/*执行具体的压缩工作,从输入迭代器中读取键值对,合并数据,写入输出文件,更新版本信息*/
Status DBImpl::DoCompactionWork(CompactionState* compact) {
const uint64_t start_micros = env_->NowMicros();// 初始化开始时间
int64_t imm_micros = 0; // Micros spent doing imm_ compactions
// 记录日志
Log(options_.info_log, "Compacting %d@%d + %d@%d files",
compact->compaction->num_input_files(0), compact->compaction->level(),
compact->compaction->num_input_files(1),
compact->compaction->level() + 1);
assert(versions_->NumLevelFiles(compact->compaction->level()) > 0);
assert(compact->builder == nullptr);
assert(compact->outfile == nullptr);
if (snapshots_.empty()) {// 设置快照
compact->smallest_snapshot = versions_->LastSequence();
} else {
compact->smallest_snapshot = snapshots_.oldest()->sequence_number();
}
// 为当前版本创建一个迭代器,用于遍历待压缩的键值对
Iterator* input = versions_->MakeInputIterator(compact->compaction);
// Release mutex while we're actually doing the compaction work
mutex_.Unlock();
input->SeekToFirst(); // 检查迭代器是否有效
Status status;
ParsedInternalKey ikey;
std::string current_user_key;
bool has_current_user_key = false;
SequenceNumber last_sequence_for_key = kMaxSequenceNumber;
这部分就是,断言避免编码,做好日志,初始化时间等,准备数据,设置快照…然后前面是需要加锁的,然后开始解锁,设置迭代器,seq。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
/*遍历处理键值对,根据压缩的需求决定哪些键值对保留,哪些需要抛弃*/
while (input->Valid() && !shutting_down_.load(std::memory_order_acquire)) {
// Prioritize immutable compaction work优先处理imm
if (has_imm_.load(std::memory_order_relaxed)) {
const uint64_t imm_start = env_->NowMicros();
mutex_.Lock();
if (imm_ != nullptr) {
CompactMemTable(); // 这个函数可以压缩不可变内存表
// Wake up MakeRoomForWrite() if necessary.若imm为空格,唤醒相关函数
background_work_finished_signal_.SignalAll();
}
mutex_.Unlock();
imm_micros += (env_->NowMicros() - imm_start); // 记录处理不可变内存表所花费的时间
}
Slice key = input->key();// 通过迭代器获取当前键
if (compact->compaction->ShouldStopBefore(key) &&
compact->builder != nullptr) { // 到达停止条件时完成写入
status = FinishCompactionOutputFile(compact, input);
if (!status.ok()) {
break;
}
}
// Handle key/value, add to state, etc.
bool drop = false; // 解析当前键,获取用户键和序列号
if (!ParseInternalKey(key, &ikey)) {
// Do not hide error keys 解析失败,重置相关变量
current_user_key.clear();
has_current_user_key = false;
last_sequence_for_key = kMaxSequenceNumber;
} else { // 处理解析成功的键
if (!has_current_user_key ||
user_comparator()->Compare(ikey.user_key, Slice(current_user_key)) !=
0) {
// First occurrence of this user key
current_user_key.assign(ikey.user_key.data(), ikey.user_key.size());
has_current_user_key = true;
last_sequence_for_key = kMaxSequenceNumber;
}
if (last_sequence_for_key <= compact->smallest_snapshot) {
// Hidden by an newer entry for same user key
drop = true; // (A)
} else if (ikey.type == kTypeDeletion &&
ikey.sequence <= compact->smallest_snapshot &&
compact->compaction->IsBaseLevelForKey(ikey.user_key)) {
// For this user key:
// (1) there is no data in higher levels
// (2) data in lower levels will have larger sequence numbers
// (3) data in layers that are being compacted here and have
// smaller sequence numbers will be dropped in the next
// few iterations of this loop (by rule (A) above).
// Therefore this deletion marker is obsolete and can be dropped.
drop = true;
}
last_sequence_for_key = ikey.sequence;
}
if (!drop) { // 继续处理
/*打开输出文件,更新输出文件最小最大键,将键值对添加到当前输出文件*/
// Open output file if necessary
if (compact->builder == nullptr) {
status = OpenCompactionOutputFile(compact);
if (!status.ok()) {
break;
}
}
// 如果为第一个条目,设置最小值
if (compact->builder->NumEntries() == 0) {
compact->current_output()->smallest.DecodeFrom(key);
} // 更新当前条目的最大键
compact->current_output()->largest.DecodeFrom(key);
compact->builder->Add(key, input->value()); // 添加键值对
// Close output file if it is big enough 关闭输出文件
if (compact->builder->FileSize() >=
compact->compaction->MaxOutputFileSize()) {
status = FinishCompactionOutputFile(compact, input);
if (!status.ok()) {
break;
}
}
}
input->Next();
}
在处理过程中,函数会优先处理不可变内存表,确保在压缩过程中不会丢失重要数据。对于每个输入键,函数会解析其内部格式并判断是否需要丢弃,基于其序列号和类型。如果键有效,就将其添加到当前的输出文件中,必要时会打开新文件并检查文件大小以决定是否完成写入。整个过程中,函数还会处理各种状态检查,并在最后记录压缩的统计信息,以便分析性能和效果。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
/*处理完成情况*/
if (status.ok() && shutting_down_.load(std::memory_order_acquire)) {
status = Status::IOError("Deleting DB during compaction");
}
if (status.ok() && compact->builder != nullptr) {
status = FinishCompactionOutputFile(compact, input);
}
if (status.ok()) {
status = input->status();
}
delete input;
input = nullptr;
/*统计信息:包括压缩时间,字节读取,写入统计*/
CompactionStats stats;
stats.micros = env_->NowMicros() - start_micros - imm_micros;
for (int which = 0; which < 2; which++) {
for (int i = 0; i < compact->compaction->num_input_files(which); i++) {
stats.bytes_read += compact->compaction->input(which, i)->file_size;
}
}
for (size_t i = 0; i < compact->outputs.size(); i++) {
stats.bytes_written += compact->outputs[i].file_size;
}
mutex_.Lock();
stats_[compact->compaction->level() + 1].Add(stats);
/*安装压缩结果:更新版本控制,记录错误*/
if (status.ok()) {
status = InstallCompactionResults(compact);
}
if (!status.ok()) {
RecordBackgroundError(status);
}
/*记录日志*/
VersionSet::LevelSummaryStorage tmp;
Log(options_.info_log, "compacted to: %s", versions_->LevelSummary(&tmp));
return status;
}
注:
要注意一个误区是major compaction和minor compaction不是两个具体的过程。它们都是读取文件,合并数据,写入新文件,更新版本信息这几个过程。minor和major我刚开始以为是底层和高层的不同压缩,这样理解不准确,应该是微型和大型压缩更为合适。
minor相对简单,主要涉及少量文件的合并。major会涉及更多,层之内,层与层之间的文件的合并等。
version
前言
leveldb每次生成或者删除sstable,都会从一个版本升级成另外一个版本。换句话说,每次都会从一个版本升级成另外一个版本。sstable的更替对于leveldb来说是一个最小的操作单元,具有原子性。。
从leveldb的角度来看,MVCC机制不仅能够并行化实现读读和读写操作,还使其能够实现快照读。用户可以通过提供的接口保留一定时间的快照,在用户释放快照前,该快照创建时leveldb中存在的数据就不会被释放。
LevelDB的多版本存储设计可分为三个层次:
- 从key/value的角度: 每次变更操作的记录(Batch Writer可视为一次操作)都有不同且递增的SequenceNumber。对于一个UserKey,当存在SequenceNumber更高的的记录时,旧的记录不会被立即删除,至少要在该SequenceNumber之前的所有Snapshot都被释放后才能删除(具体删除时间与Compaction时间有关)。这是LevelDB实现Snapshot Read的基础。
- 从MemTable的角度: LevelDB中的MemTable通过引用计数来控制释放时间。在需要读取MemTable时(无论是Get操作还是Minor Compaction时),读取前会增大其引用计数,读取后减小引用计数。这样,即使MemTable已被通过Minor Compaction操作写入到Level-0文件,MemTable在被读取,它就不会被释放,保证能被多次读。
- 从数据库文件的角度: LevelDB的文件同样需要引用计数,当执行Major Compaction时,LevelDB不会立即删除已被合并的数据库文件,因为此时可能还有未完成的读取该文件的操作。
key/value的版本实际上也是依赖于内存与稳定存储,其分别在Compaction与Put/Get操作中体现,因此这里我们主要关注后两者。
MemTable的多版本与Snapshot信息是不需要直接持久化的,因为数据库关闭时无法进行Snapshot Read,也就没有了Snapshot的概念,而最新的MemTable会通过WAL重建,旧的MemTable也不再会被依赖。
数据库文件则不同,LevelDB必须记录数据库文件的版本信息,否则在数据库重启时无法快速确定哪些文件是有效的(LevelDB提供了文件版本信息损坏时的修复机制)。而LevelDB中Version及相关概念就是为此设计的。
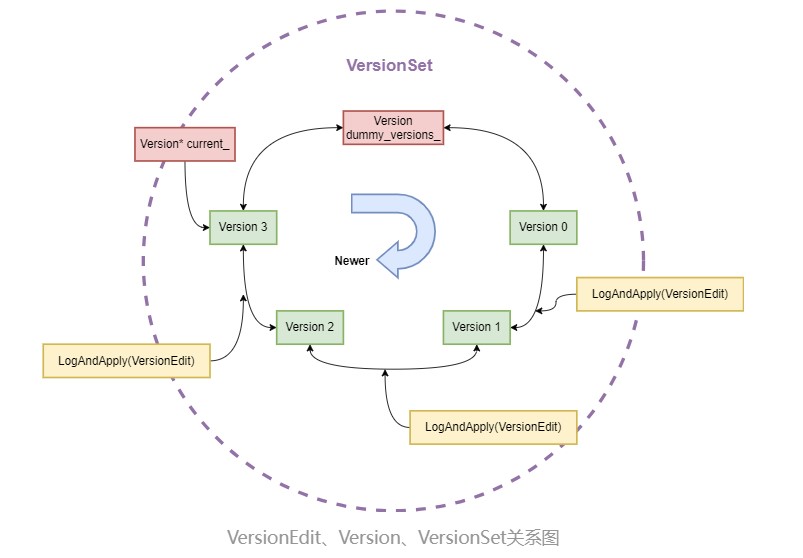
VersionSet是一个管理和维护多个版本的集合,而
VersionEdit是对版本变化的具体描述和记录。通过这种结构,LevelDB能够有效地管理数据的版本控制和变化。
源码分析
version_set.h 文件定义了 LevelDB 中版本管理和压缩的核心数据结构。Version 和 VersionSet 类负责维护数据库的版本及其文件信息,而 Compaction 类则处理压缩操作。这个结构确保了 LevelDB 能高效地管理数据的版本和执行压缩策略,从而优化性能。同时相关文件有Manifest和Current。
class compaction
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
class Compaction {
public:
...
private:
friend class Version;
friend class VersionSet;
Compaction(const Options* options, int level);
int level_; //正在进行压缩的级别
uint64_t max_output_file_size_; // 最大输出文件大小限制
Version* input_version_; // 指向当前压缩的输入版本
VersionEdit edit_; // 保存压缩操作所作的编辑内容,包含需要添加和删除的文件
// Each compaction reads inputs from "level_" and "level_+1"
// 一个存储当前级别,一个存储下一个几倍
std::vector<FileMetaData*> inputs_[2]; // The two sets of inputs
// State used to check for number of overlapping grandparent files
// (parent == level_ + 1, grandparent == level_ + 2)
std::vector<FileMetaData*> grandparents_;
size_t grandparent_index_; // Index in grandparent_starts_
bool seen_key_; // Some output key has been seen
int64_t overlapped_bytes_; // Bytes of overlap between current output
// and grandparent files
// State for implementing IsBaseLevelForKey
// level_ptrs_ holds indices into input_version_->levels_: our state
// is that we are positioned at one of the file ranges for each
// higher level than the ones involved in this compaction (i.e. for
// all L >= level_ + 2).
// 输入版本的文件列表中为每个级别保存指向当前状态的索引
size_t level_ptrs_[config::kNumLevels];
};
Manifest
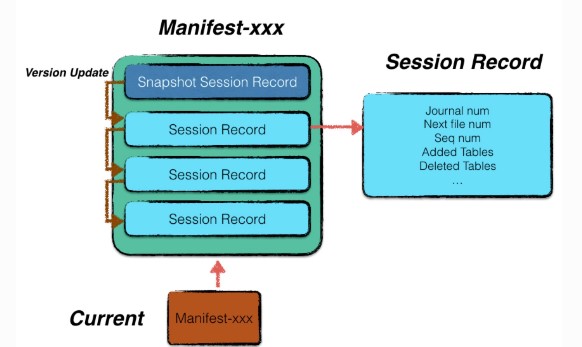
manifest文件专用于记录版本信息。leveldb采用了增量式的存储方式,记录每一个版本相较于上一个版本的变化情况。展开来说,一个Manifest文件中,包含了多条Session Record,其中第一条Session Record记载了当时leveldb的全量版本信息,其余若干条Session Record仅记录每次更迭的变化情况。
version_edit
VersionEdit类在levelDB中与上面manifest文件管理密切相关。 manifest文件用于记录数据库的元数据和版本信息。每当数据库状态发生变化时,都会生成一个新的manifest文件,具体表现在versionset中有体现。
1
2
3
4
5
6
7
8
9
10
11
enum Tag {
kComparator = 1, // 比较器的名称字符串
kLogNumber = 2, // 文件编号
kNextFileNumber = 3, // 下一个文件分配的编号
kLastSequence = 4, // 当前版本的最后一个序列号
kCompactPointer = 5, // 压缩指针
kDeletedFile = 6, // 删除的元数据
kNewFile = 7, // 新文件
// 8 was used for large value refs
kPrevLogNumber = 9 // 文件编号
};
version_edit文件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
/*文件元数据,存储每个sst文件的元数据*/
struct FileMetaData {
FileMetaData() : refs(0), allowed_seeks(1 << 30), file_size(0) {}
int refs; // 引用计数
int allowed_seeks; // Seeks allowed until compaction 容易触发seek compaction
uint64_t number; // 文件的唯一编号
uint64_t file_size; // File size in bytes
InternalKey smallest; // Smallest internal key served by table
InternalKey largest; // Largest internal key served by table
};
/*记录版本的变化信息*/
class VersionEdit {
public:
VersionEdit() { Clear(); }
~VersionEdit() = default;
void Clear();
// 设置信息
void SetComparatorName(const Slice& name) {
has_comparator_ = true;
comparator_ = name.ToString();
}
void SetLogNumber(uint64_t num) {
has_log_number_ = true;
log_number_ = num;
}
void SetPrevLogNumber(uint64_t num) {
has_prev_log_number_ = true;
prev_log_number_ = num;
}
void SetNextFile(uint64_t num) {
has_next_file_number_ = true;
next_file_number_ = num;
}
void SetLastSequence(SequenceNumber seq) {
has_last_sequence_ = true;
last_sequence_ = seq;
}
void SetCompactPointer(int level, const InternalKey& key) {
compact_pointers_.push_back(std::make_pair(level, key));
}
// 添加删除文件
// Add the specified file at the specified number.
// REQUIRES: This version has not been saved (see VersionSet::SaveTo)
// REQUIRES: "smallest" and "largest" are smallest and largest keys in file
void AddFile(int level, uint64_t file, uint64_t file_size,
const InternalKey& smallest, const InternalKey& largest) {
FileMetaData f;
f.number = file;
f.file_size = file_size;
f.smallest = smallest;
f.largest = largest;
new_files_.push_back(std::make_pair(level, f));
}
// Delete the specified "file" from the specified "level".
void RemoveFile(int level, uint64_t file) {
deleted_files_.insert(std::make_pair(level, file));
}
// 编码解码
void EncodeTo(std::string* dst) const;
Status DecodeFrom(const Slice& src);
std::string DebugString() const;
private:
friend class VersionSet;
typedef std::set<std::pair<int, uint64_t>> DeletedFileSet;
std::string comparator_; //比较器名称
uint64_t log_number_; // 日志编号
uint64_t prev_log_number_;
uint64_t next_file_number_;
SequenceNumber last_sequence_; // 最后一个序列号
bool has_comparator_;
bool has_log_number_;
bool has_prev_log_number_;
bool has_next_file_number_;
bool has_last_sequence_;
std::vector<std::pair<int, InternalKey>> compact_pointers_; // 存储压缩指针
DeletedFileSet deleted_files_; // 跟踪已删除的文件,便于版本更新时管理
std::vector<std::pair<int, FileMetaData>> new_files_; // 存储新添加的文件信息
};
在创建新版本时,LevelDB首先构造VersionEdit,然后通过VersionSet::LogAndApply方法,先将VersionEdit应用到Current Version,然后将增量的VersionEdit写入Manifest文件中。
version_set
class version
version文件主要用于存储数据库的某个具体版本,包括当前版本的所有文件,统计信息以及相关状态。其中维护了一个文件列表记录每个层级的sst文件,不同版本之间的连接方式为双向链表;通过引用计数管理version对象的生命周期等。
同时还有和compaction相关的成员变量,
比如当前需要进行压缩的元数据以及所在层级(确定待压缩候选者)
比如当前版本的压缩评分和下一个需要压缩的层级(管理压缩的紧迫性和优先级)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
class Version{
public:
...
private:
friend class Compaction;
friend class VersionSet;
class LevelFileNumIterator;
explicit Version(VersionSet* vset)
: vset_(vset),
next_(this),
prev_(this),
refs_(0),
file_to_compact_(nullptr),
file_to_compact_level_(-1),
compaction_score_(-1),
compaction_level_(-1) {}
Version(const Version&) = delete;
Version& operator=(const Version&) = delete;
~Version();
Iterator* NewConcatenatingIterator(const ReadOptions&, int level) const;
// Call func(arg, level, f) for every file that overlaps user_key in
// order from newest to oldest. If an invocation of func returns
// false, makes no more calls.
//
// REQUIRES: user portion of internal_key == user_key.
void ForEachOverlapping(Slice user_key, Slice internal_key, void* arg, bool (*func)(void*, int, FileMetaData*));
VersionSet* vset_; // VersionSet to which this Version belongs
Version* next_; // Next version in linked list
Version* prev_; // Previous version in linked list
int refs_; // Number of live refs to this version
// List of files per level
std::vector<FileMetaData*> files_[config::kNumLevels];
// Next file to compact based on seek stats.
FileMetaData* file_to_compact_;
int file_to_compact_level_;
// Level that should be compacted next and its compaction score.
// Score < 1 means compaction is not strictly needed. These fields
// are initialized by Finalize().
double compaction_score_;
int compaction_level_;
};
class versionset
versionset主要用于管理多个version对象,负责维护数据库的版本历史和状态。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
class VersionSet {
public:
...
private:
class Builder;
friend class Compaction;
friend class Version;
bool ReuseManifest(const std::string& dscname, const std::string& dscbase);
void Finalize(Version* v);
// 进行压缩或者查询时,了解数据范围有助于优化性能
void GetRange(const std::vector<FileMetaData*>& inputs, InternalKey* smallest, InternalKey* largest);
// 合并文件时考虑文件范围
void GetRange2(const std::vector<FileMetaData*>& inputs1, const std::vector<FileMetaData*>& inputs2, InternalKey* smallest, InternalKey* largest);
// 为压缩操作设置其它输入文件
void SetupOtherInputs(Compaction* c);
// Save current contents to *log
Status WriteSnapshot(log::Writer* log);
void AppendVersion(Version* v);
Env* const env_;
const std::string dbname_; // 数据库名称
const Options* const options_; // 数据库选项
TableCache* const table_cache_; // 表缓存
const InternalKeyComparator icmp_; // 内部键比较器
uint64_t next_file_number_;
uint64_t manifest_file_number_;
uint64_t last_sequence_; // 所有写操作中最后使用的序列号
uint64_t log_number_;
uint64_t prev_log_number_; // 0 or backing store for memtable being compacted
// Opened lazily
WritableFile* descriptor_file_; // 数据库描述符文件
log::Writer* descriptor_log_; // 写入日志
Version dummy_versions_; // Head of circular doubly-linked list of versions.循环双链表的虚拟头
Version* current_; // == dummy_versions_.prev_指向当前版本
// Per-level key at which the next compaction at that level should start.压缩指针
// Either an empty string, or a valid InternalKey.
std::string compact_pointer_[config::kNumLevels];
};
通过LogAndApply()方法应用VersionEdit对象,创建新的Version并将其添加到VersionSet中。下面来看看LogAndApply函数的过程:
-
保存状态:首先,它会保存当前的锁状态,以确保在写入文件时不会有其他线程干扰。
-
更新版本:接着,通过传入的
VersionEdit对象,更新当前的版本信息。这可能包括创建新版本,保存新版本到builder类中,删除旧文件、更新日志编号等。 -
写入日志:在更新版本的同时,
LogAndApply会将这些变更记录到持久化日志中,以便后续的恢复操作。1 2 3 4 5 6 7 8 9 10 11 12 13
Status s; if (descriptor_log_ == nullptr) { // No reason to unlock *mu here since we only hit this path in the // first call to LogAndApply (when opening the database). assert(descriptor_file_ == nullptr); // 日志为空时,生成新的描述符文件名,创建可写文件 new_manifest_file = DescriptorFileName(dbname_, manifest_file_number_); s = env_->NewWritableFile(new_manifest_file, &descriptor_file_); if (s.ok()) { // 将其作为新的日志写入其,同时将当前版本快照写入日志 descriptor_log_ = new log::Writer(descriptor_file_); s = WriteSnapshot(descriptor_log_); }
-
应用更改:更新完成后,函数会应用这些更改到当前版本,确保数据库状态与日志一致。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
{ mu->Unlock(); // Write new record to MANIFEST log if (s.ok()) { std::string record; edit->EncodeTo(&record); s = descriptor_log_->AddRecord(record); //使用 descriptor_log_ 将该记录添加到MANIFEST日志中。 if (s.ok()) { // 同步到磁盘,确保写入持久化 s = descriptor_file_->Sync(); } if (!s.ok()) { Log(options_->info_log, "MANIFEST write: %s\n", s.ToString().c_str()); } } // If we just created a new descriptor file, install it by writing a // new CURRENT file that points to it. if (s.ok() && !new_manifest_file.empty()) { // 更新current文件,指向新创建的描述符文件 s = SetCurrentFile(env_, dbname_, manifest_file_number_); } mu->Lock(); }
-
释放锁:最后,释放锁并返回结果,完成整个过程。
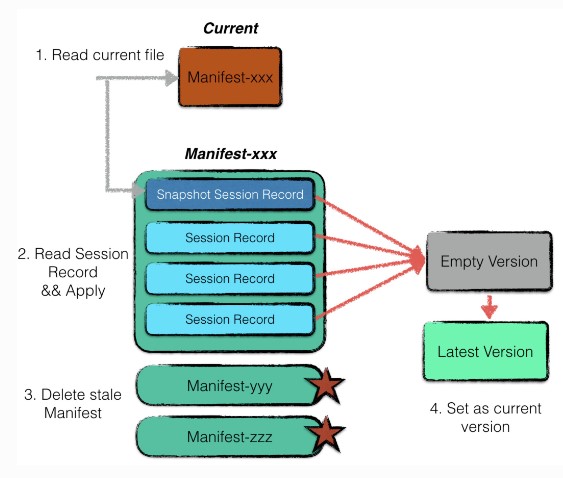
Recover
由于数据库启动前需要恢复数据,也就是利用Manifest信息重新构建一个最新的version。
-
利用current文件读取最近使用的Manifest文件。
-
创建一个空的version,利用manifest文件中的session record依次apply,还原出一个最新的version,注意manifest的第一条session record记录的是一个version的snapshot,后面记录的都是增量。
(为了避免manifest过大,每次启动时重新创建的manifest的第一条都是当前版本的快照状态,其它过期的manifest文件会在下次启动的recover流程中自行删除)
-
将非current文件指向的其它过期的manifest文件删除。
-
将新建的version作为当前数据库的version。
Repair
repair.cc中只有一个公共接口,Run()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Status Run() {
/*查找数据库目录中的文件
* 解析文件名,提取文件编号和类型
* 对于描述符文件,文件名存入manifest
* 对于日志和表文件,存储在logs和table_number中
*/
Status status = FindFiles();
if (status.ok()) {
ConvertLogFilesToTables(); // 将日志文件转换成表文件
ExtractMetaData(); // 获取每个文件的元数据(key)以及最终数据库的元数据(seq)
status = WriteDescriptor(); // 创建一个新的manifest文件,将扫描的数据库元数据进行记录
}
if (status.ok()) {
unsigned long long bytes = 0;
for (size_t i = 0; i < tables_.size(); i++) {
bytes += tables_[i].meta.file_size;
}
Log(options_.info_log,
"**** Repaired leveldb %s; "
"recovered %d files; %llu bytes. "
"Some data may have been lost. "
"****",
dbname_.c_str(), static_cast<int>(tables_.size()), bytes);
}
return status;
}
但是该方法的效率十分低下,首先需要对整个数据库的文件进行扫描,其次0层的文件必然将远远大于4个,这将导致极多的compaction发生。
有关这部分的大致内容就是这样子了,关于version的内容其实可以再次精细化,留个点位,leveldb整体一遍学完后也还会留时间再回头看看的。